Overview
The Student Exoskeleton Organization (ExO) was started as a collaboration between the graduate students conducting research in soft actuation through smart materials and the biological studies laboratory at Embry-Riddle Aeronautical University. The purpose of the collaboration was to create a device that could later serve as a test platform for soft actuation technologies. The purpose of ExO is to create a series of medical assistive devices wherein each supplies half of the required work needed for full range of motion to the primary joint of that motion. A long term goal of the organization is to have many assistive devices applied at many vital joints of the human body to in aggregate form a ‘full’ exoskeleton.
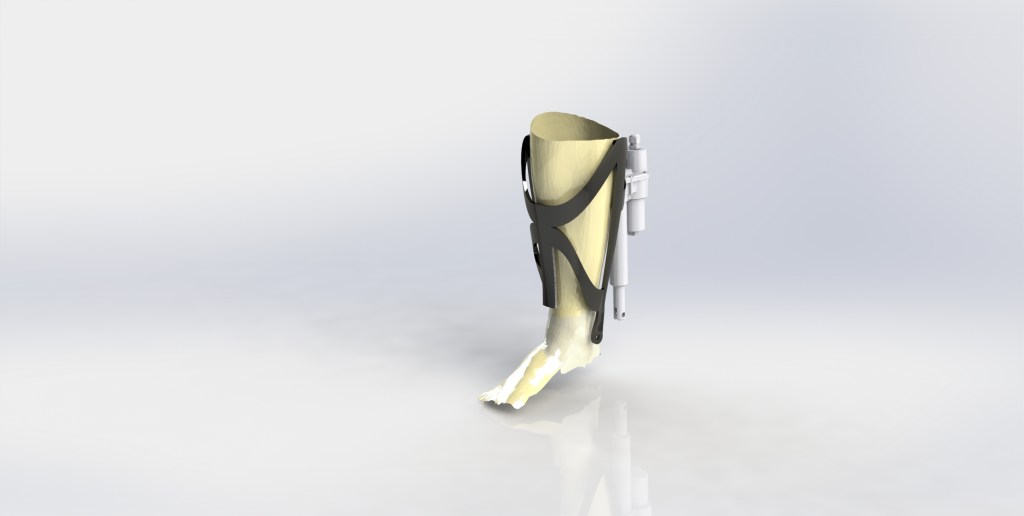
The initial device designed by ExO is a knee assistive device that employs an electronic linear actuator to provide a force at some moment arm to simulate torque generated at the knee. The frame utilizes a patient specific 3D printed frame made from a carbon particulate nylon material and was designed and parameterized to the user in CAD. The goal of the geometry was to be as lightweight as possible while still being ergonomic to the user as well as sufficiently structural to handle all provided loads. The geometry was analyzed using FEA to simulate the stresses and deflections under highest possible load and under life cycle conditions.
The actuation of the device was dictated by a controller with integrated electromyography (EMG) which took signals from the brain which allows the device to predict movement from the user as they are moving. This minimizes the device instantiating movement instead of the user, or from having a delayed response. The purpose of this system is to use sensory input and control systems to create an assistive device that works as seamlessly as possible.
Involvement
Being part of the inception of ExO and one of the few graduate students to guide the project, I served as Vice President in my time with the organization. My time would be spent in both roles involving leadership of the team and administrative tasks as well as guiding sub teams within their particular tasks. Constructing teams based on their interests and strengths helped to keep teams engaged and productive.
I would assist teams in tasks such as geometric design, design for manufacturability, and control systems. As a researcher at the university for soft actuation many considerations had to be made for the existing device from the beginning to ensure a seamless integration of the soft actuator to any ExO device as a test platform and proof of concept.